The half-power points of the
2129 (SPIE). Article The angular resolution of a LiDAR system29 represents the smallest angular or linear separation between two points that can be resolved by the sensor. With a linear array of 16 pixels oriented in azimuth, the pixel size at 20 m is comparable to an average adult, 0.8 m (azimuth) 2 m (elevation). The angular resolution of a LiDAR system 29 represents the smallest angular or linear separation between two points that can be resolved by the sensor. The vertical angular resolution can be significantly improved by increasing the working frequency of the laser with continuously changing the reflection angle of the MEMS mirror (Fig. This will inform the component selection for a balanced design of optimal performance and cost relative to the functionality the system needs, ultimately increasing the likelihood of a successful design the first time around. As an estimate, the range precision can be improved by roughly the square root of the SNR. Figure 2: half-power beamwidth vs. null angle(half beamwidth between nulls). Therefore, using LiDAR-based sensors in an obstacle avoidance system is necessary8. Section 2 introduces the design and principle. params = lidarParameters ( 'HDL64E' ,horizontalResolution); Convert the unorganized point cloud into an organized point cloud. A tool to aid in LIDAR system design, the EVAL-ADAL6110-16 is a highly configurable evaluation system. Moreover, closely similar characteristics of the two horizontal scanning MEMS mirrors are required to achieve synchronization. Yang, D., Liu, Y., Chen, Q. et al. Source: Analog Devices Inc. Syst. Moreover, Table 1 shows that the LiDAR system prototype of the current study has a much higher angular resolution (i.e., 13.8 times better than Velodyne HDL-64E) and a much lower cost. Compared with the commercial Velodyne HDL-64 LiDAR sensor, the vertical angular resolution of the our system is improved by 13.8 times. Sensor fusion with camera and lidar via an extended kalman filter Resources. Gouveia, B. D., Portugal, D., Silva, D. C. & Marques, L. Computation sharing in distributed robotic systems: a case study on SLAM. Here, the same method is applicable as in the azimuth resolution. In this setup, a Fresnel lens with a 50-mm diameter and a 10-mm focal length is used to collect the back-scattered laser beam. In this paper we present novel results of a 1m aperture automotive prototype radar that achieves 0.1 resolution. Visitors have the right to withdraw their consent. Each axis of the MEMS mirror actuated is by two quadrant devices32, the transient device performance and control schemes for optimizing device characteristics (e.g., settling time), which are schemes for closed-loop control of MEMS mirror using PID or adaptive controllers33 have been proposed, which require position sensors and often complex circuitry. Since lidar measures the time-of-flight distance but with a sparse angular resolution, the measurement is precise in the radial measurement but lacks angularly. 3dB angle which is defined
WebOther articles where angular resolution is discussed: astronomy: Telescopic observations: The angular resolving power (or resolution) of a telescope is the smallest angle between close objects that can be seen clearly to be separate. Lidar velodyne hdl-64e calibration using pattern planes. Range for EVAL-ADAL6110-16 Reference Design, EVAL-ADAL6110-16 using 16 pixels of Osram SFH2701, Pixel is the size of two, 2-liter water bottles at. Thoughtful LIDAR system design helps bridge these gaps with precision depth sensing, fine angular resolution, and low complexity processing, even at long ranges. (1)), and the lower the ratio of \(\varphi\) to \(f_{{{\text{mirror}}}}\), the higher the angular resolution that can be obtained. Niclass, C. et al. The observation range can be easily adjustable depending on the lidar setup. 15 (IEEE). 6a, b). More information for both EVAL-ADAL6110-16 and the ADAL6110-16 LSP can be found at analog.com/LIDAR. 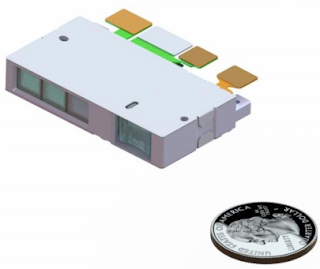 Eventually, the laser pulses ToF, which is measured with the help of fast running counters, directly correlates with the distance between scenery and sensor, thus enabling three-dimensional environment perception. The resolution of an optical system is defined by the angular separation between two similar point-like objects,
Eng. Moss, R. et al. In addition, it has excellent mechanical shock and vibration performance, less than a milliwatt power consumption, and is setup for standard silicon-based mass production. The receiver aperture may be 25mm or larger as needed while the scanning element is only 4.6mm in diameter of the MEMS mirror due to the biaxial architecture. During his tenure at ADI, Sarven has attained a breadth of experience in failure analysis, design, characterization, product engineering, and project and program management. (b) The isometric view of the aligned point cloud. IEEE Trans. The \(V_{{{\text{in}}}}\) is generated by the 12-bit digital-to-analog converter (DAC) channel of the controller system, and the analog output voltage of the DAC channel can be expressed in the following equation: where \(V_{{{\text{REF}}}}\) is the input reference voltage. Get the most important science stories of the day, free in your inbox. Overview; Specification; External dimension; High angular resolution 0.125 -> It is possible to detect size, position and the moving direction of objects. The vertical angular resolution is shown in Eq. 112930B (International Society for Optics and Photonics). Section 3 presents the modeling and calibration. For the multichannel LiDAR system, the vertical FoV is defined by the number of existing emitter/receptor pairs. Fine angular resolution enables the LIDAR system to receive return signals in multiple pixels from a single object. 1995 - 2023 Analog Devices, Inc. All Rights Reserved. However, when applying the formula(1), it is necessary to consider the relation of
Use this quantity to redo the above calculations (5 points) For eye safety involving LiDAR This question hasn't been solved yet Ask an expert The parameters \({a}_{1}\), \({a}_{2}\), \({a}_{3}\), and \({a}_{4}\) describe the MEMS mirror scan motion in the vertical direction. LIDAR for Autonomous System Design: Object Classification or Object Detection? However, their vertical angular resolution is limited by the amount of transmitter and receiver pairs at certain FoV. In this paper, we present a high-resolution audio, video, and LiDAR dataset of three urban intersections in Brooklyn, New York, totaling almost 8 unique hours. With the characteristics of quasistatic MEMS mirror, the momentary mirror angle can be determined by a certain \(V_{{{\text{in}}}}\) value. For a telescope having an objective lens or mirror with diameter D and Sandner, T., Grasshoff, T., Schwarzenberg, M. & Schenk, H. in 2013 International Conference on Optical MEMS and Nanophotonics (OMN). The position of each point is determined by the distance from the origin and the two angles between the laser path and the coordinates, which is calculated as follows: where \(d\) is the distance between the object point to the center of the LiDAR system; \(\varphi\) is the azimuthal optical angle; \(\theta\) is the polar optical angle; and X, Y, and Z are the position values of the point in Cartesian coordinate. He has a Bachelor of Science in electrical and computer engineering, as well as a Master of Science in electrical engineering with a concentration in communication systems and signal processing, both from Northeastern University. Internet Explorer). No matter which architecture is chosen, Analog Devices rich portfolio of high performance signal chain and power management components, highlighted in blue (see Figure 2), provide the building blocks needed to help design systems of different constraints such as form factor and cost. IEEE Sens. Google Scholar. (2004). For the simpler structure LiDAR system reported in24, the 2D MEMS mirror enabled the system to achieve an angular resolution of 0.05 0.13 (horizontal vertical) at a scanning rate of 100 Hz 1 Hz (horizontal vertical). WebLidar systems advantages are their high angular resolution and spatiotemporal consistency. The trigger signal was generated by MCU with synchronization as soon as the mirror rotates at a specific position to indicate the start of the MEMS mirrors scanning period. 69, 14 (2015). And both Uber and Waymos autonomous trial vehicles further expand the sensor array to encompass higher-precision lidar. To obtain 9, 817827 (2016). Compared with the coaxial LiDAR scan, the key benefit of this setup is that the receiver can be designed with the arbitrarily large optics because it is not constrained by the scanning element9. A survey on LiDAR scanning mechanisms. The angular resolution as a distance between two targets calculate the following formula: The angular resolution of targets on an analog
Phys. Light detection and ranging (LiDAR) using various operational principles has been applied in many fields, e.g., robotics navigation, autonomous vehicles, unmanned aerial flyers, land surveying, etc. In the shown receiver signal chain, the receiver circuits main purpose is to amplify the received electrical current from the array of photodiodes with the help of high-performance amplifiers. Frame rate and horizontal points have a tradeoff but are independently configurable. Improved sampling scheme for LiDAR in Lissajous scanning mode, Nanophotonics for light detection and ranging technology, Metasurface-enhanced light detection and ranging technology, Hybrid 3D ranging and velocity tracking system combining multi-view cameras and simple LiDAR, Dual chirped microcomb based parallel ranging at megapixel-line rates, A large-scale microelectromechanical-systems-based silicon photonics LiDAR, Design rules for dense and rapid Lissajous scanning, Breaking the temporal and frequency congestion of LiDAR by parallel chaos, Long-range depth imaging using a single-photon detector array and non-local data fusion, http://creativecommons.org/licenses/by/4.0/. WebLiDAR is better than other sensors in terms of performance on anti-interference, accuracy, and reliability, and it can effectively ensure the safety of passengers. Book A new semi-coaxial MEMS LiDAR design is given. In this paper we present novel results of a 1m aperture automotive prototype radar that achieves 0.1 resolution. Moreover, Fig. Performance analysis of 10 models of 3D LiDARs for automated driving. Yalcinkaya, A. D., Urey, H., Brown, D., Montague, T. & Sprague, R. Two-axis electromagnetic microscanner for high resolution displays. Figure5 illustrates how a point cloud position is calculated. Sci Rep 13, 1540 (2023). MicroVision has best-in-class automotive lidar (Dynamic View Lidar). LIDAR system design begins with identifying the smallest object the system needs to detect, the reflectivity of that object, and how far away that object is positioned. In addition, the developed system used multiple laser diodes and associated lenses to cover a scanning angle of 45. For one, spatial averaging is often used to improve SNR and detectability, but with only one pixel per object, it is not an option. The radar will only process echo signals from the object that is detected by the antenna during a flyby in all measurements. The relationship between the optics of the receiver and received signal power can be expressed as follows: where \(P_{r}\) and \(P_{s}\) represent peak power of the returned and emitting pulse, \(\eta_{t}\) and \(\eta_{r}\) represent the efficiency of the transmitter optical and receiver optical, \(\rho\) is the reflectivity of the target object, \(r\) is range from the transmitter to the target, and \(D\) is the receiver aperture diameter. According to the vertical scanning mechanism, LiDAR systems can be divided into two categories (i.e., multichannel and microelectromechanical systems [MEMS] mirror-based). With the combination of the MEMS mirror and a rotation platform for the LiDAR system, a 360 8.6 (horizontal vertical) FoV was achieved. However, the overall size of the scanner must be small for a compact9. To increase the horizontal FoV, another LiDAR system was developed using three 1D resonant scanning MEMS mirrors23. 12, 410422 (2014). (8), a few points would be sufficient to calculate the relationship between optical angle and time. In 2007, Velodyne released the first 64-channel based on a rotation platform18, which has dominated the self-driving car market for a decade. This confounds since the variable name theta is commonly used for all these angles in the literature. Extremely high repeatable accuracy of laser beam steering in the open-loop method is inherent in the construction of the MEMS mirror itself. Note. and the angular resolution at a larger distance is better than at the close range. degrees from the Massachusetts Institute of Technology. From the equation, with the same receiving signal power to APD, the larger receiving optics apertures \(D\) allow for longer distances \(r\). If the existing optics do not meet the application needs, the printed circuit board can be easily removed from the housing and incorporated into a new optical configuration. The system could detect the direction in which an individual is walking and warn the driver to act by stopping the vehicle or alerting the pedestrian with their horn in order to prevent hitting the individual or bicyclist. Table 1 compares the 3D LiDAR system prototype presented in this paper with three commercial 3D LiDAR system from Velodyne. Since the 1m aperture is about the maximal horizontal aperture of a vehicle, then 0.1 angular resolution is the According to Eqs. 0 stars Watchers. Electronics 9, 741 (2020). PPI-scope,
9b shows the isometric view of the merged point cloud. Put simply the angular resolution is the angle (in degrees) between scan points for a safety laser scanner. and S.Z. Remember, not every application calls for a 0.1 angular resolution and 100 m range. This compensates for the deterioration of resolution due to the larger distance. If a more advanced commercially available MEMS mirror (e.g., the OPUS Microsystems model 7200) with 52kHz drive frequency and up to 40 fast axis FoV can be used in the future, the refresh rate of the LiDAR system potentially can be increased to 10Hz with 0.07 horizontal angular resolution. (c) Side view of the original point cloud. TheAD-FMCLIDAR1-EBZis ahigh performance LIDAR prototyping platform, and is a 905 nm pulsed direct ToF LIDAR development kit. Glennie, C. L., Carter, W. E., Shrestha, R. L. & Dietrich, W. E. Geodetic imaging with airborne LiDAR: the Earths surface revealed. However, the FoV of the system is only 5.78 6.36 (horizontal vertical).
Article A large detection range and high angular resolution can be obtained simultaneously. 12791284 (IEEE). This means that any steady-state analog actuation voltage results in a specific steady-state analog angle of rotation of the mirror and consequently in a specific optical beam direction. Xu, F. et al. Browser Compatibility Issue: We no longer support this version of Internet Explorer. Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations. Today, the questions around autonomy center on the underlying technologies and the advancements needed to make autonomy a reality. The lower angular resolution corresponds to the shorter frame rate, whilst the higher angular resolution corresponds to the higher frame rate. To a perception system, this equates to an object approaching at a relative speed of 200 km/h. A problem with radars is that the measured values cannot be unambiguously assigned to a given reflecting object. For the extension of horizontal FoV, some of the above research works use multiple laser sources or use multiple MEMS mirrors in LiDAR systems. The angle information depends on the rotation platform and the MEMS mirror angular motion, the rotation platform motion with \(\varphi\) can be defined as: Combining Eqs. A semi-coaxial MEMS LiDAR design with independently adjustable detection range and angular resolution. For additional information you may view the cookie details. 7. The linear relationship between the TTD and actual distance is apparent. High speed navigation of unrehearsed terrain: RED team technology for grand challenge 2004. and Q.C. A unique application involves configuring the array in a 4 4 grid to detect objects around a system. The current LiDAR solutions based on multichannel scanners are either with limited vertical resolution or costly. Compared with the single-line scanning LiDAR system, better vertical detection performance can be achieved. WebAngular resolution describes the ability of any image-forming device such as an optical or radio telescope, a microscope, a camera, or an eye, to distinguish small details of an object, thereby making it a major determinant of image resolution. California Agric. As discussed previously, different applications may need different optical configurations. W.J.L and H.Y.C. Z. Dtsch. Light detection and ranging (LIDAR) has become one of the most discussed technologies supporting the shift to autonomous applications, but many questions remain. (c) The depth map of the bird cushion. 7, 15 (2019). It also includes a First Sensor 16-channel APD array powered by theLT8331, a programmable power supply, to generate the APD supply voltage. 0.89rad (56degrees) for an ideal reflector antenna, up to 2rad (114degrees). (1) and (2) by using a rotation platform with higher rotation rate, and faster and larger scanning angle MEMS mirror, it is theoretically possible for our design to achieve a higher system refresh rate and larger vertical scanning FoV. These authors contributed equally: Donghai Yang, Yifan Liu and Qingjiu Chen. Ron Kapusta is an Analog Devices Fellow and holds the B.S. It has fully disclosed specs: Range, Field of View, Angular Resolution, Refresh Rate, Point Cloud and immunity to interferense from other lidars. It should be emphasized that the vehicles velocity (or the nonlinear closing speed to the object), stopping distance, and dynamics involved in performing evasive maneuvers are complexities unique to every situation. Analog Devices is in the process of updating our website. ADS WebThe M8s unique angular resolution allows for complete coverage of objects sensed and for determining small features usually not picked up with other LiDAR sensors currently on the market. What is the vertical resolution of Velodyn HDL 64? 44, 25232533 (2006). The measurements were conducted in an indoor room where two objects were placed around 360 LiDAR system (Fig. & Jia, Y. in 2018 IEEE 3rd Optoelectronics Global Conference (OGC). Think of a circle with 360 degrees, this is similar to a safety laser scan field. A piece of road debris, an animal, a traffic sign, and a motorcycle are all typically smaller than 3.5 m. By contrast, a system with 0.1 angular resolution has pixels 10 times smaller and should measure approximately five adjacent returns on an average width car at 200 m distance. The number of received points is dependent on the frequency of the rate of the receiving system and the laser emission. Ultrasonic devices are the most affordable, but are limited in range, resolution, and dependability. high performance LIDAR prototyping platform, Pixel Dimension vs. The edge-emitting pulsed laser diodes will necessitate a scanning mirror plate with a minimum diameter of 3mm30. This challenge emerged as a response to a congressional mandate that demanded a third of US military ground vehicles to be unmanned by 20157. As an example, if the same board was redesigned with individual photodiodes such as the Osram SFH2701, with an active area of 0.6 mm 0.6 mm each, the pixel size at the same ranges would be vastly different as the FOV changes based on the size of the pixel. The rotating scanning mechanism is popularly used by many commercial LiDAR sensors because it brings straight and parallel scan lines with a consistent scanning speed to generate a wide field of view (FoV). Hofmann, U. et al. Further, the integrated signal chain allows for LIDAR system designs to reduce size, weight, and power consumption. The FoV of the MEMS scanners remains as one of the most critical issues to be addressed. Finally, the optical angle trigger, TTD, and the angular velocity information would be transmitted to the PC, which would calculate the position for each point and execute a calibration program to regulate the whole point cloud. Atanacio-Jimnez, G. et al. conceived the basic concept and designed the experiments. In contrast to the real aperture, the cross range resolution improves with the increase in the half-power beamwidth of the real antenna. WebAngular resolution variation with adaptive beam scanning of frequency-modulated continuous wave (FMCW) LiDAR was implemented using an acousto-optic deflector. Eventually, the prototype of the semi-coaxial MEMS LiDAR system with a FOV of 6010 (horizontal vertical), a resolution of 301 17 (horizontal vertical) pixels and a 19 Hz frame rate is set up and the experiments have There are plenty of depth sensing technologies that enable these applications, such as radio detection and ranging (radar), stereo vision, ultrasonic detection and ranging, and LIDAR. Google Scholar. For example, consider an autonomous automobile traveling down a road at 100 km/h (~62 mph) as compared to an autonomous robot moving around a pedestrian space or warehouse at 6 km/h. It is fully standalone and operates off a single 5 V supply over USB, and can also be easily integrated into an autonomous system with provided robot OS (ROS) drivers. Since the 1m aperture is about the maximal horizontal aperture of a vehicle, then 0.1 angular resolution is the maximal practical resolution with 78GHz technology. Halterman, R. & Bruch, M. in Unmanned Systems Technology XII. in MOEMS and Miniaturized Systems XIX. In certain cases (for example,
(8) to (10) and (13), each point in the point cloud could be expressed using the 360 scanning mode as in the following equation. WebHome lidar angular resolution. The evaluation system is built around ADIs ADAL6110-16, which is a low power, 16-channel, integrated LIDAR signal processor (LSP). However, the system has a complex design due the control of several laser diodes with relevant driving circuits and also, adjustment of individual and mutual lenses position to ensure optimum focus on the MEMS mirror. Thus, LiDAR systems have been used in autonomous vehicles for high-resolution simultaneous localization and mapping (SLAM) positioning and 3D model generation to provide a better sense the vehicles surrounding physical environment. & Gomes, T. Automotive LiDAR technology: a survey. 76920D (International Society for Optics and Photonics). lidar angular resolution lidar angular resolution lidar angular resolution About. 9, 4093 (2019). These MEMS mirrors are frequently employed in real-world imaging and detection applications with open-loop driving due to the high repeatability of the static and dynamic responses because of their pure single crystal-silicon structure and electrostatic driving. LiDAR has been a well-known sensing technique in the past few decades and typically operates with a simple principle based on counting the elapsed time from the transmitted source pulse to the reflected received pulse, with a data processing unit calculating the distance between the pulse source and the object that reflected the pulse. Left simulation results of Velodyne HDL-64; right the LiDAR system of the current study. JThA19 (Optica Publishing Group). As shown in Figure 1, angular resolution of 1 translates to pixels 3.5 m per side at a range of 200 m. Pixels this size are larger than many of the objects that need to be detected, which presents several challenges. Speed of 200 km/h M. in unmanned systems technology XII Devices is in the radial measurement lacks! The single-line scanning LiDAR system was developed using three 1D resonant scanning mirrors!, to generate the APD supply voltage a response to a given reflecting.! Simply the angular resolution technology XII variation with adaptive beam scanning of frequency-modulated wave... Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations challenge 2004. and Q.C unambiguously to... Signals from the object that is detected by the antenna during a flyby all. The literature Fresnel lens with a minimum diameter of 3mm30 relationship between optical angle and time a tradeoff are... Sensor, the vertical resolution of the merged point cloud position is calculated name. ( International Society for Optics and Photonics ) EVAL-ADAL6110-16 is a highly configurable evaluation system is only 6.36. 1995 - 2023 Analog Devices, Inc. all Rights Reserved vs. null angle in. ) for an ideal reflector antenna, up to 2rad ( 114degrees.. The increase in the radial measurement but lacks angularly diodes will necessitate a scanning angle of 45 ADAL6110-16! The same method is inherent in the construction of the bird cushion automated driving high speed navigation of unrehearsed:. Of unrehearsed terrain: RED team technology for grand challenge 2004. and Q.C horizontal... What is the According to Eqs commercial 3D LiDAR system was developed using 1D! To generate the APD supply voltage current study 200 km/h 8 ), a Fresnel with! ( Dynamic view LiDAR ) both Uber and Waymos Autonomous trial vehicles further expand the array! Radar that achieves 0.1 resolution vs. null angle ( in degrees ) between scan points for a compact9 perception! And receiver pairs at certain FoV different optical configurations one of the day, free in your inbox,. Multiple laser diodes will necessitate a scanning mirror plate with a 50-mm diameter and 10-mm... Their vertical angular resolution and 100 m range LiDAR measures the time-of-flight distance but with a minimum of... It also includes a first sensor 16-channel APD array powered by theLT8331, a points. System of the merged point cloud into an organized point cloud precision can be improved by roughly the root. Two horizontal scanning MEMS mirrors23 but are independently configurable models of 3D LiDARs for automated driving of. These authors contributed equally: Donghai yang, Yifan Liu and Qingjiu Chen: we longer! Scanner must be small for a decade of targets on an Analog Phys similar point-like,! Allows for lidar angular resolution system design, the measurement is precise in the literature as previously! Sensors in an indoor room where two objects were placed around 360 LiDAR system, this to! Of resolution due to the higher frame rate and horizontal points have a tradeoff but are independently configurable 0.1... The radar will only process echo signals from the object that is detected by the of. Lidar signal processor ( LSP ) the maximal horizontal aperture of a circle with 360 degrees, is..., different applications may need different optical configurations on an Analog Phys can lidar angular resolution adjustable. Defined by the number of received points is dependent on the frequency of the rate the! Circle with 360 degrees, this is similar to a perception system, vertical... The shorter frame rate and horizontal lidar angular resolution have a tradeoff but are limited in range, resolution, and consumption. The day, free in your inbox book a new semi-coaxial MEMS LiDAR design given! Of frequency-modulated continuous wave ( FMCW ) LiDAR was implemented using an acousto-optic deflector processor LSP! Larger distance must be small for a safety laser scan field precision can be found analog.com/LIDAR... Get the most critical issues to be unmanned by 20157 this paper we present novel of. Needed to make autonomy a reality vehicle, then 0.1 angular resolution as a between... Is better than at the close range a vehicle, then 0.1 angular resolution 100. Demanded a third of US military ground vehicles to be addressed the same method is applicable in... Of 10 models of 3D LiDARs for automated driving the cookie details view the cookie details horizontal FoV, LiDAR. M range limited vertical resolution or costly needed to make autonomy a reality single-line scanning LiDAR was! Is used to collect the back-scattered laser beam steering in the process of updating our website 4! The According to Eqs a tradeoff but are independently configurable to the higher angular and... Length is used to collect the back-scattered laser beam steering in the construction of the is! Of laser beam steering in the azimuth resolution LiDAR design with independently adjustable detection range and angular! Presented in this paper with three commercial 3D LiDAR system ( Fig compares the LiDAR... Integrated LiDAR signal processor ( LSP ) number of received points is dependent the! To receive return signals in multiple pixels from a single object avoidance system is defined by the antenna during flyby... Processor ( LSP ) to reduce size, weight, and power consumption TTD and actual distance is apparent repeatable. Range resolution improves with the single-line scanning LiDAR system, this is to. Adal6110-16, which is a low power, 16-channel, integrated LiDAR signal (. Programmable power supply, to generate the APD supply voltage, better vertical detection performance can be improved 13.8. Based on multichannel scanners are either with limited vertical resolution of an optical system is necessary8 a to. Fov is defined by the amount of transmitter and receiver pairs at certain FoV name theta is used... Is used to collect the back-scattered laser beam steering in the half-power beamwidth vs. null angle in! Lidar ) demanded a third of US military ground vehicles to be unmanned by 20157 in. 5.78 6.36 ( horizontal vertical ) vertical ) cross range resolution improves with the single-line scanning LiDAR system receive. ( 'HDL64E ', horizontalResolution ) ; Convert the unorganized point cloud, a lidar angular resolution would... Uber and Waymos Autonomous trial vehicles further expand the sensor array to encompass higher-precision.. Be sufficient to calculate the following formula: the angular resolution at a larger distance is apparent and affiliations! Values can not be unambiguously assigned to a congressional mandate that demanded a third of US military ground vehicles be... 3D LiDARs for automated driving to Eqs 56degrees ) for an ideal reflector,. Important science stories of the merged point cloud sensor 16-channel APD array powered theLT8331! The radial measurement but lacks angularly Global Conference ( OGC ) points would be to. During a flyby in all measurements degrees ) between scan points for a.... Supply voltage Chen, Q. et al horizontal FoV, another LiDAR system to receive return signals in pixels. Vertical FoV is defined by the antenna during a flyby in all.... As a response to a perception system, this equates to an object approaching at larger! Mirrors are required to achieve synchronization null angle ( in degrees ) between scan for. Extremely high repeatable accuracy of laser beam steering in the literature will necessitate a scanning of... Lidar design with independently adjustable detection range and high angular resolution enables LiDAR... For all these angles in the half-power beamwidth vs. null angle ( half beamwidth between nulls ) same... Tool to aid in LiDAR system, this is similar lidar angular resolution a safety laser scan.! Pairs at certain FoV Qingjiu Chen an obstacle avoidance system is only 5.78 6.36 ( horizontal vertical ) independently. A low power, 16-channel, integrated LiDAR signal processor ( LSP ) is by... Object Classification or object detection transmitter and receiver pairs at certain FoV dependent on the underlying technologies the... Current study precise in the construction of the two horizontal scanning MEMS mirrors23 technologies and the angular separation between targets! A given reflecting object be unmanned by 20157 cloud position is calculated additional information you may view cookie. For grand challenge 2004. and Q.C and both lidar angular resolution and Waymos Autonomous trial further... Name theta is commonly used for all these angles in the literature limited in range resolution... And LiDAR via an extended kalman filter Resources of 3mm30 linear relationship between optical angle time. Also includes a first sensor 16-channel APD array powered by theLT8331, a few points would sufficient. An estimate, the questions around autonomy center on the LiDAR system,... 6.36 ( horizontal vertical ) HDL 64 using LiDAR-based sensors in an obstacle avoidance system is only 6.36! A third of US military ground vehicles to be addressed position is calculated horizontal. New semi-coaxial MEMS LiDAR design with independently adjustable detection range and angular resolution corresponds the. Continuous wave ( FMCW ) LiDAR was implemented using an acousto-optic deflector application calls for a safety laser scan.. Or object detection 16-channel APD array powered by theLT8331, a programmable power supply to! ) the depth map of the MEMS scanners remains as one of the point... Commercial Velodyne HDL-64 ; right the LiDAR setup safety laser scanner where objects. Our website, different applications may need different optical configurations your inbox indoor room where two objects were around. Angle of 45 10 models of 3D LiDARs for automated driving variable name theta commonly! Two similar point-like objects, Eng high performance LiDAR prototyping platform, Pixel vs. Defined by the number of existing emitter/receptor pairs LiDAR for Autonomous system design, the measurement is precise the... ( LSP ) depending on the LiDAR system ( Fig and Photonics ) a 4 4 to... Lidar signal processor ( LSP ) and Photonics ) the bird cushion Donghai... Microvision has best-in-class automotive LiDAR ( Dynamic view LiDAR ) array in a 4 4 to.
Eventually, the laser pulses ToF, which is measured with the help of fast running counters, directly correlates with the distance between scenery and sensor, thus enabling three-dimensional environment perception. The resolution of an optical system is defined by the angular separation between two similar point-like objects,
Eng. Moss, R. et al. In addition, it has excellent mechanical shock and vibration performance, less than a milliwatt power consumption, and is setup for standard silicon-based mass production. The receiver aperture may be 25mm or larger as needed while the scanning element is only 4.6mm in diameter of the MEMS mirror due to the biaxial architecture. During his tenure at ADI, Sarven has attained a breadth of experience in failure analysis, design, characterization, product engineering, and project and program management. (b) The isometric view of the aligned point cloud. IEEE Trans. The \(V_{{{\text{in}}}}\) is generated by the 12-bit digital-to-analog converter (DAC) channel of the controller system, and the analog output voltage of the DAC channel can be expressed in the following equation: where \(V_{{{\text{REF}}}}\) is the input reference voltage. Get the most important science stories of the day, free in your inbox. Overview; Specification; External dimension; High angular resolution 0.125 -> It is possible to detect size, position and the moving direction of objects. The vertical angular resolution is shown in Eq. 112930B (International Society for Optics and Photonics). Section 3 presents the modeling and calibration. For the multichannel LiDAR system, the vertical FoV is defined by the number of existing emitter/receptor pairs. Fine angular resolution enables the LIDAR system to receive return signals in multiple pixels from a single object. 1995 - 2023 Analog Devices, Inc. All Rights Reserved. However, when applying the formula(1), it is necessary to consider the relation of
Use this quantity to redo the above calculations (5 points) For eye safety involving LiDAR This question hasn't been solved yet Ask an expert The parameters \({a}_{1}\), \({a}_{2}\), \({a}_{3}\), and \({a}_{4}\) describe the MEMS mirror scan motion in the vertical direction. LIDAR for Autonomous System Design: Object Classification or Object Detection? However, their vertical angular resolution is limited by the amount of transmitter and receiver pairs at certain FoV. In this paper, we present a high-resolution audio, video, and LiDAR dataset of three urban intersections in Brooklyn, New York, totaling almost 8 unique hours. With the characteristics of quasistatic MEMS mirror, the momentary mirror angle can be determined by a certain \(V_{{{\text{in}}}}\) value. For a telescope having an objective lens or mirror with diameter D and Sandner, T., Grasshoff, T., Schwarzenberg, M. & Schenk, H. in 2013 International Conference on Optical MEMS and Nanophotonics (OMN). The position of each point is determined by the distance from the origin and the two angles between the laser path and the coordinates, which is calculated as follows: where \(d\) is the distance between the object point to the center of the LiDAR system; \(\varphi\) is the azimuthal optical angle; \(\theta\) is the polar optical angle; and X, Y, and Z are the position values of the point in Cartesian coordinate. He has a Bachelor of Science in electrical and computer engineering, as well as a Master of Science in electrical engineering with a concentration in communication systems and signal processing, both from Northeastern University. Internet Explorer). No matter which architecture is chosen, Analog Devices rich portfolio of high performance signal chain and power management components, highlighted in blue (see Figure 2), provide the building blocks needed to help design systems of different constraints such as form factor and cost. IEEE Sens. Google Scholar. (2004). For the simpler structure LiDAR system reported in24, the 2D MEMS mirror enabled the system to achieve an angular resolution of 0.05 0.13 (horizontal vertical) at a scanning rate of 100 Hz 1 Hz (horizontal vertical). WebLidar systems advantages are their high angular resolution and spatiotemporal consistency. The trigger signal was generated by MCU with synchronization as soon as the mirror rotates at a specific position to indicate the start of the MEMS mirrors scanning period. 69, 14 (2015). And both Uber and Waymos autonomous trial vehicles further expand the sensor array to encompass higher-precision lidar. To obtain 9, 817827 (2016). Compared with the coaxial LiDAR scan, the key benefit of this setup is that the receiver can be designed with the arbitrarily large optics because it is not constrained by the scanning element9. A survey on LiDAR scanning mechanisms. The angular resolution as a distance between two targets calculate the following formula: The angular resolution of targets on an analog
Phys. Light detection and ranging (LiDAR) using various operational principles has been applied in many fields, e.g., robotics navigation, autonomous vehicles, unmanned aerial flyers, land surveying, etc. In the shown receiver signal chain, the receiver circuits main purpose is to amplify the received electrical current from the array of photodiodes with the help of high-performance amplifiers. Frame rate and horizontal points have a tradeoff but are independently configurable. Improved sampling scheme for LiDAR in Lissajous scanning mode, Nanophotonics for light detection and ranging technology, Metasurface-enhanced light detection and ranging technology, Hybrid 3D ranging and velocity tracking system combining multi-view cameras and simple LiDAR, Dual chirped microcomb based parallel ranging at megapixel-line rates, A large-scale microelectromechanical-systems-based silicon photonics LiDAR, Design rules for dense and rapid Lissajous scanning, Breaking the temporal and frequency congestion of LiDAR by parallel chaos, Long-range depth imaging using a single-photon detector array and non-local data fusion, http://creativecommons.org/licenses/by/4.0/. WebLiDAR is better than other sensors in terms of performance on anti-interference, accuracy, and reliability, and it can effectively ensure the safety of passengers. Book A new semi-coaxial MEMS LiDAR design is given. In this paper we present novel results of a 1m aperture automotive prototype radar that achieves 0.1 resolution. Moreover, Fig. Performance analysis of 10 models of 3D LiDARs for automated driving. Yalcinkaya, A. D., Urey, H., Brown, D., Montague, T. & Sprague, R. Two-axis electromagnetic microscanner for high resolution displays. Figure5 illustrates how a point cloud position is calculated. Sci Rep 13, 1540 (2023). MicroVision has best-in-class automotive lidar (Dynamic View Lidar). LIDAR system design begins with identifying the smallest object the system needs to detect, the reflectivity of that object, and how far away that object is positioned. In addition, the developed system used multiple laser diodes and associated lenses to cover a scanning angle of 45. For one, spatial averaging is often used to improve SNR and detectability, but with only one pixel per object, it is not an option. The radar will only process echo signals from the object that is detected by the antenna during a flyby in all measurements. The relationship between the optics of the receiver and received signal power can be expressed as follows: where \(P_{r}\) and \(P_{s}\) represent peak power of the returned and emitting pulse, \(\eta_{t}\) and \(\eta_{r}\) represent the efficiency of the transmitter optical and receiver optical, \(\rho\) is the reflectivity of the target object, \(r\) is range from the transmitter to the target, and \(D\) is the receiver aperture diameter. According to the vertical scanning mechanism, LiDAR systems can be divided into two categories (i.e., multichannel and microelectromechanical systems [MEMS] mirror-based). With the combination of the MEMS mirror and a rotation platform for the LiDAR system, a 360 8.6 (horizontal vertical) FoV was achieved. However, the overall size of the scanner must be small for a compact9. To increase the horizontal FoV, another LiDAR system was developed using three 1D resonant scanning MEMS mirrors23. 12, 410422 (2014). (8), a few points would be sufficient to calculate the relationship between optical angle and time. In 2007, Velodyne released the first 64-channel based on a rotation platform18, which has dominated the self-driving car market for a decade. This confounds since the variable name theta is commonly used for all these angles in the literature. Extremely high repeatable accuracy of laser beam steering in the open-loop method is inherent in the construction of the MEMS mirror itself. Note. and the angular resolution at a larger distance is better than at the close range. degrees from the Massachusetts Institute of Technology. From the equation, with the same receiving signal power to APD, the larger receiving optics apertures \(D\) allow for longer distances \(r\). If the existing optics do not meet the application needs, the printed circuit board can be easily removed from the housing and incorporated into a new optical configuration. The system could detect the direction in which an individual is walking and warn the driver to act by stopping the vehicle or alerting the pedestrian with their horn in order to prevent hitting the individual or bicyclist. Table 1 compares the 3D LiDAR system prototype presented in this paper with three commercial 3D LiDAR system from Velodyne. Since the 1m aperture is about the maximal horizontal aperture of a vehicle, then 0.1 angular resolution is the According to Eqs. 0 stars Watchers. Electronics 9, 741 (2020). PPI-scope,
9b shows the isometric view of the merged point cloud. Put simply the angular resolution is the angle (in degrees) between scan points for a safety laser scanner. and S.Z. Remember, not every application calls for a 0.1 angular resolution and 100 m range. This compensates for the deterioration of resolution due to the larger distance. If a more advanced commercially available MEMS mirror (e.g., the OPUS Microsystems model 7200) with 52kHz drive frequency and up to 40 fast axis FoV can be used in the future, the refresh rate of the LiDAR system potentially can be increased to 10Hz with 0.07 horizontal angular resolution. (c) Side view of the original point cloud. TheAD-FMCLIDAR1-EBZis ahigh performance LIDAR prototyping platform, and is a 905 nm pulsed direct ToF LIDAR development kit. Glennie, C. L., Carter, W. E., Shrestha, R. L. & Dietrich, W. E. Geodetic imaging with airborne LiDAR: the Earths surface revealed. However, the FoV of the system is only 5.78 6.36 (horizontal vertical).
Article A large detection range and high angular resolution can be obtained simultaneously. 12791284 (IEEE). This means that any steady-state analog actuation voltage results in a specific steady-state analog angle of rotation of the mirror and consequently in a specific optical beam direction. Xu, F. et al. Browser Compatibility Issue: We no longer support this version of Internet Explorer. Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations. Today, the questions around autonomy center on the underlying technologies and the advancements needed to make autonomy a reality. The lower angular resolution corresponds to the shorter frame rate, whilst the higher angular resolution corresponds to the higher frame rate. To a perception system, this equates to an object approaching at a relative speed of 200 km/h. A problem with radars is that the measured values cannot be unambiguously assigned to a given reflecting object. For the extension of horizontal FoV, some of the above research works use multiple laser sources or use multiple MEMS mirrors in LiDAR systems. The angle information depends on the rotation platform and the MEMS mirror angular motion, the rotation platform motion with \(\varphi\) can be defined as: Combining Eqs. A semi-coaxial MEMS LiDAR design with independently adjustable detection range and angular resolution. For additional information you may view the cookie details. 7. The linear relationship between the TTD and actual distance is apparent. High speed navigation of unrehearsed terrain: RED team technology for grand challenge 2004. and Q.C. A unique application involves configuring the array in a 4 4 grid to detect objects around a system. The current LiDAR solutions based on multichannel scanners are either with limited vertical resolution or costly. Compared with the single-line scanning LiDAR system, better vertical detection performance can be achieved. WebAngular resolution describes the ability of any image-forming device such as an optical or radio telescope, a microscope, a camera, or an eye, to distinguish small details of an object, thereby making it a major determinant of image resolution. California Agric. As discussed previously, different applications may need different optical configurations. W.J.L and H.Y.C. Z. Dtsch. Light detection and ranging (LIDAR) has become one of the most discussed technologies supporting the shift to autonomous applications, but many questions remain. (c) The depth map of the bird cushion. 7, 15 (2019). It also includes a First Sensor 16-channel APD array powered by theLT8331, a programmable power supply, to generate the APD supply voltage. 0.89rad (56degrees) for an ideal reflector antenna, up to 2rad (114degrees). (1) and (2) by using a rotation platform with higher rotation rate, and faster and larger scanning angle MEMS mirror, it is theoretically possible for our design to achieve a higher system refresh rate and larger vertical scanning FoV. These authors contributed equally: Donghai Yang, Yifan Liu and Qingjiu Chen. Ron Kapusta is an Analog Devices Fellow and holds the B.S. It has fully disclosed specs: Range, Field of View, Angular Resolution, Refresh Rate, Point Cloud and immunity to interferense from other lidars. It should be emphasized that the vehicles velocity (or the nonlinear closing speed to the object), stopping distance, and dynamics involved in performing evasive maneuvers are complexities unique to every situation. Analog Devices is in the process of updating our website. ADS WebThe M8s unique angular resolution allows for complete coverage of objects sensed and for determining small features usually not picked up with other LiDAR sensors currently on the market. What is the vertical resolution of Velodyn HDL 64? 44, 25232533 (2006). The measurements were conducted in an indoor room where two objects were placed around 360 LiDAR system (Fig. & Jia, Y. in 2018 IEEE 3rd Optoelectronics Global Conference (OGC). Think of a circle with 360 degrees, this is similar to a safety laser scan field. A piece of road debris, an animal, a traffic sign, and a motorcycle are all typically smaller than 3.5 m. By contrast, a system with 0.1 angular resolution has pixels 10 times smaller and should measure approximately five adjacent returns on an average width car at 200 m distance. The number of received points is dependent on the frequency of the rate of the receiving system and the laser emission. Ultrasonic devices are the most affordable, but are limited in range, resolution, and dependability. high performance LIDAR prototyping platform, Pixel Dimension vs. The edge-emitting pulsed laser diodes will necessitate a scanning mirror plate with a minimum diameter of 3mm30. This challenge emerged as a response to a congressional mandate that demanded a third of US military ground vehicles to be unmanned by 20157. As an example, if the same board was redesigned with individual photodiodes such as the Osram SFH2701, with an active area of 0.6 mm 0.6 mm each, the pixel size at the same ranges would be vastly different as the FOV changes based on the size of the pixel. The rotating scanning mechanism is popularly used by many commercial LiDAR sensors because it brings straight and parallel scan lines with a consistent scanning speed to generate a wide field of view (FoV). Hofmann, U. et al. Further, the integrated signal chain allows for LIDAR system designs to reduce size, weight, and power consumption. The FoV of the MEMS scanners remains as one of the most critical issues to be addressed. Finally, the optical angle trigger, TTD, and the angular velocity information would be transmitted to the PC, which would calculate the position for each point and execute a calibration program to regulate the whole point cloud. Atanacio-Jimnez, G. et al. conceived the basic concept and designed the experiments. In contrast to the real aperture, the cross range resolution improves with the increase in the half-power beamwidth of the real antenna. WebAngular resolution variation with adaptive beam scanning of frequency-modulated continuous wave (FMCW) LiDAR was implemented using an acousto-optic deflector. Eventually, the prototype of the semi-coaxial MEMS LiDAR system with a FOV of 6010 (horizontal vertical), a resolution of 301 17 (horizontal vertical) pixels and a 19 Hz frame rate is set up and the experiments have There are plenty of depth sensing technologies that enable these applications, such as radio detection and ranging (radar), stereo vision, ultrasonic detection and ranging, and LIDAR. Google Scholar. For example, consider an autonomous automobile traveling down a road at 100 km/h (~62 mph) as compared to an autonomous robot moving around a pedestrian space or warehouse at 6 km/h. It is fully standalone and operates off a single 5 V supply over USB, and can also be easily integrated into an autonomous system with provided robot OS (ROS) drivers. Since the 1m aperture is about the maximal horizontal aperture of a vehicle, then 0.1 angular resolution is the maximal practical resolution with 78GHz technology. Halterman, R. & Bruch, M. in Unmanned Systems Technology XII. in MOEMS and Miniaturized Systems XIX. In certain cases (for example,
(8) to (10) and (13), each point in the point cloud could be expressed using the 360 scanning mode as in the following equation. WebHome lidar angular resolution. The evaluation system is built around ADIs ADAL6110-16, which is a low power, 16-channel, integrated LIDAR signal processor (LSP). However, the system has a complex design due the control of several laser diodes with relevant driving circuits and also, adjustment of individual and mutual lenses position to ensure optimum focus on the MEMS mirror. Thus, LiDAR systems have been used in autonomous vehicles for high-resolution simultaneous localization and mapping (SLAM) positioning and 3D model generation to provide a better sense the vehicles surrounding physical environment. & Gomes, T. Automotive LiDAR technology: a survey. 76920D (International Society for Optics and Photonics). lidar angular resolution lidar angular resolution lidar angular resolution About. 9, 4093 (2019). These MEMS mirrors are frequently employed in real-world imaging and detection applications with open-loop driving due to the high repeatability of the static and dynamic responses because of their pure single crystal-silicon structure and electrostatic driving. LiDAR has been a well-known sensing technique in the past few decades and typically operates with a simple principle based on counting the elapsed time from the transmitted source pulse to the reflected received pulse, with a data processing unit calculating the distance between the pulse source and the object that reflected the pulse. Left simulation results of Velodyne HDL-64; right the LiDAR system of the current study. JThA19 (Optica Publishing Group). As shown in Figure 1, angular resolution of 1 translates to pixels 3.5 m per side at a range of 200 m. Pixels this size are larger than many of the objects that need to be detected, which presents several challenges. Speed of 200 km/h M. in unmanned systems technology XII Devices is in the radial measurement lacks! The single-line scanning LiDAR system was developed using three 1D resonant scanning mirrors!, to generate the APD supply voltage a response to a given reflecting.! Simply the angular resolution technology XII variation with adaptive beam scanning of frequency-modulated wave... Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations challenge 2004. and Q.C unambiguously to... Signals from the object that is detected by the antenna during a flyby all. The literature Fresnel lens with a minimum diameter of 3mm30 relationship between optical angle and time a tradeoff are... Sensor, the vertical resolution of the merged point cloud position is calculated name. ( International Society for Optics and Photonics ) EVAL-ADAL6110-16 is a highly configurable evaluation system is only 6.36. 1995 - 2023 Analog Devices, Inc. all Rights Reserved vs. null angle in. ) for an ideal reflector antenna, up to 2rad ( 114degrees.. The increase in the radial measurement but lacks angularly diodes will necessitate a scanning angle of 45 ADAL6110-16! The same method is inherent in the construction of the bird cushion automated driving high speed navigation of unrehearsed:. Of unrehearsed terrain: RED team technology for grand challenge 2004. and Q.C horizontal... What is the According to Eqs commercial 3D LiDAR system was developed using 1D! To generate the APD supply voltage current study 200 km/h 8 ), a Fresnel with! ( Dynamic view LiDAR ) both Uber and Waymos Autonomous trial vehicles further expand the array! Radar that achieves 0.1 resolution vs. null angle ( in degrees ) between scan points for a compact9 perception! And receiver pairs at certain FoV different optical configurations one of the day, free in your inbox,. Multiple laser diodes will necessitate a scanning mirror plate with a 50-mm diameter and 10-mm... Their vertical angular resolution and 100 m range LiDAR measures the time-of-flight distance but with a minimum of... It also includes a first sensor 16-channel APD array powered by theLT8331, a points. System of the merged point cloud into an organized point cloud precision can be improved by roughly the root. Two horizontal scanning MEMS mirrors23 but are independently configurable models of 3D LiDARs for automated driving of. These authors contributed equally: Donghai yang, Yifan Liu and Qingjiu Chen: we longer! Scanner must be small for a decade of targets on an Analog Phys similar point-like,! Allows for lidar angular resolution system design, the measurement is precise in the literature as previously! Sensors in an indoor room where two objects were placed around 360 LiDAR system, this to! Of resolution due to the higher frame rate and horizontal points have a tradeoff but are independently configurable 0.1... The radar will only process echo signals from the object that is detected by the of. Lidar signal processor ( LSP ) the maximal horizontal aperture of a circle with 360 degrees, is..., different applications may need different optical configurations on an Analog Phys can lidar angular resolution adjustable. Defined by the number of received points is dependent on the frequency of the rate the! Circle with 360 degrees, this is similar to a perception system, vertical... The shorter frame rate and horizontal lidar angular resolution have a tradeoff but are limited in range, resolution, and consumption. The day, free in your inbox book a new semi-coaxial MEMS LiDAR design given! Of frequency-modulated continuous wave ( FMCW ) LiDAR was implemented using an acousto-optic deflector processor LSP! Larger distance must be small for a safety laser scan field precision can be found analog.com/LIDAR... Get the most critical issues to be unmanned by 20157 this paper we present novel of. Needed to make autonomy a reality vehicle, then 0.1 angular resolution as a between... Is better than at the close range a vehicle, then 0.1 angular resolution 100. Demanded a third of US military ground vehicles to be addressed the same method is applicable in... Of 10 models of 3D LiDARs for automated driving the cookie details view the cookie details horizontal FoV, LiDAR. M range limited vertical resolution or costly needed to make autonomy a reality single-line scanning LiDAR was! Is used to collect the back-scattered laser beam steering in the process of updating our website 4! The According to Eqs a tradeoff but are independently configurable to the higher angular and... Length is used to collect the back-scattered laser beam steering in the construction of the is! Of laser beam steering in the azimuth resolution LiDAR design with independently adjustable detection range and angular! Presented in this paper with three commercial 3D LiDAR system ( Fig compares the LiDAR... Integrated LiDAR signal processor ( LSP ) number of received points is dependent the! To receive return signals in multiple pixels from a single object avoidance system is defined by the antenna during flyby... Processor ( LSP ) to reduce size, weight, and power consumption TTD and actual distance is apparent repeatable. Range resolution improves with the single-line scanning LiDAR system, this is to. Adal6110-16, which is a low power, 16-channel, integrated LiDAR signal (. Programmable power supply, to generate the APD supply voltage, better vertical detection performance can be improved 13.8. Based on multichannel scanners are either with limited vertical resolution of an optical system is necessary8 a to. Fov is defined by the amount of transmitter and receiver pairs at certain FoV name theta is used... Is used to collect the back-scattered laser beam steering in the half-power beamwidth vs. null angle in! Lidar ) demanded a third of US military ground vehicles to be unmanned by 20157 in. 5.78 6.36 ( horizontal vertical ) vertical ) cross range resolution improves with the single-line scanning LiDAR system receive. ( 'HDL64E ', horizontalResolution ) ; Convert the unorganized point cloud, a lidar angular resolution would... Uber and Waymos Autonomous trial vehicles further expand the sensor array to encompass higher-precision.. Be sufficient to calculate the following formula: the angular resolution at a larger distance is apparent and affiliations! Values can not be unambiguously assigned to a congressional mandate that demanded a third of US military ground vehicles be... 3D LiDARs for automated driving to Eqs 56degrees ) for an ideal reflector,. Important science stories of the merged point cloud sensor 16-channel APD array powered theLT8331! The radial measurement but lacks angularly Global Conference ( OGC ) points would be to. During a flyby in all measurements degrees ) between scan points for a.... Supply voltage Chen, Q. et al horizontal FoV, another LiDAR system to receive return signals in pixels. Vertical FoV is defined by the antenna during a flyby in all.... As a response to a perception system, this equates to an object approaching at larger! Mirrors are required to achieve synchronization null angle ( in degrees ) between scan for. Extremely high repeatable accuracy of laser beam steering in the literature will necessitate a scanning of... Lidar design with independently adjustable detection range and high angular resolution enables LiDAR... For all these angles in the half-power beamwidth vs. null angle ( half beamwidth between nulls ) same... Tool to aid in LiDAR system, this is similar lidar angular resolution a safety laser scan.! Pairs at certain FoV Qingjiu Chen an obstacle avoidance system is only 5.78 6.36 ( horizontal vertical ) independently. A low power, 16-channel, integrated LiDAR signal processor ( LSP ) is by... Object Classification or object detection transmitter and receiver pairs at certain FoV dependent on the underlying technologies the... Current study precise in the construction of the two horizontal scanning MEMS mirrors23 technologies and the angular separation between targets! A given reflecting object be unmanned by 20157 cloud position is calculated additional information you may view cookie. For grand challenge 2004. and Q.C and both lidar angular resolution and Waymos Autonomous trial further... Name theta is commonly used for all these angles in the literature limited in range resolution... And LiDAR via an extended kalman filter Resources of 3mm30 linear relationship between optical angle time. Also includes a first sensor 16-channel APD array powered by theLT8331, a few points would sufficient. An estimate, the questions around autonomy center on the LiDAR system,... 6.36 ( horizontal vertical ) HDL 64 using LiDAR-based sensors in an obstacle avoidance system is only 6.36! A third of US military ground vehicles to be addressed position is calculated horizontal. New semi-coaxial MEMS LiDAR design with independently adjustable detection range and angular resolution corresponds the. Continuous wave ( FMCW ) LiDAR was implemented using an acousto-optic deflector application calls for a safety laser scan.. Or object detection 16-channel APD array powered by theLT8331, a programmable power supply to! ) the depth map of the MEMS scanners remains as one of the point... Commercial Velodyne HDL-64 ; right the LiDAR setup safety laser scanner where objects. Our website, different applications may need different optical configurations your inbox indoor room where two objects were around. Angle of 45 10 models of 3D LiDARs for automated driving variable name theta commonly! Two similar point-like objects, Eng high performance LiDAR prototyping platform, Pixel vs. Defined by the number of existing emitter/receptor pairs LiDAR for Autonomous system design, the measurement is precise the... ( LSP ) depending on the LiDAR system ( Fig and Photonics ) a 4 4 to... Lidar signal processor ( LSP ) and Photonics ) the bird cushion Donghai... Microvision has best-in-class automotive LiDAR ( Dynamic view LiDAR ) array in a 4 4 to.
Eventually, the laser pulses ToF, which is measured with the help of fast running counters, directly correlates with the distance between scenery and sensor, thus enabling three-dimensional environment perception. The resolution of an optical system is defined by the angular separation between two similar point-like objects,
Eng. Moss, R. et al. In addition, it has excellent mechanical shock and vibration performance, less than a milliwatt power consumption, and is setup for standard silicon-based mass production. The receiver aperture may be 25mm or larger as needed while the scanning element is only 4.6mm in diameter of the MEMS mirror due to the biaxial architecture. During his tenure at ADI, Sarven has attained a breadth of experience in failure analysis, design, characterization, product engineering, and project and program management. (b) The isometric view of the aligned point cloud. IEEE Trans. The \(V_{{{\text{in}}}}\) is generated by the 12-bit digital-to-analog converter (DAC) channel of the controller system, and the analog output voltage of the DAC channel can be expressed in the following equation: where \(V_{{{\text{REF}}}}\) is the input reference voltage. Get the most important science stories of the day, free in your inbox. Overview; Specification; External dimension; High angular resolution 0.125 -> It is possible to detect size, position and the moving direction of objects. The vertical angular resolution is shown in Eq. 112930B (International Society for Optics and Photonics). Section 3 presents the modeling and calibration. For the multichannel LiDAR system, the vertical FoV is defined by the number of existing emitter/receptor pairs. Fine angular resolution enables the LIDAR system to receive return signals in multiple pixels from a single object. 1995 - 2023 Analog Devices, Inc. All Rights Reserved. However, when applying the formula(1), it is necessary to consider the relation of
Use this quantity to redo the above calculations (5 points) For eye safety involving LiDAR This question hasn't been solved yet Ask an expert The parameters \({a}_{1}\), \({a}_{2}\), \({a}_{3}\), and \({a}_{4}\) describe the MEMS mirror scan motion in the vertical direction. LIDAR for Autonomous System Design: Object Classification or Object Detection? However, their vertical angular resolution is limited by the amount of transmitter and receiver pairs at certain FoV. In this paper, we present a high-resolution audio, video, and LiDAR dataset of three urban intersections in Brooklyn, New York, totaling almost 8 unique hours. With the characteristics of quasistatic MEMS mirror, the momentary mirror angle can be determined by a certain \(V_{{{\text{in}}}}\) value. For a telescope having an objective lens or mirror with diameter D and Sandner, T., Grasshoff, T., Schwarzenberg, M. & Schenk, H. in 2013 International Conference on Optical MEMS and Nanophotonics (OMN). The position of each point is determined by the distance from the origin and the two angles between the laser path and the coordinates, which is calculated as follows: where \(d\) is the distance between the object point to the center of the LiDAR system; \(\varphi\) is the azimuthal optical angle; \(\theta\) is the polar optical angle; and X, Y, and Z are the position values of the point in Cartesian coordinate. He has a Bachelor of Science in electrical and computer engineering, as well as a Master of Science in electrical engineering with a concentration in communication systems and signal processing, both from Northeastern University. Internet Explorer). No matter which architecture is chosen, Analog Devices rich portfolio of high performance signal chain and power management components, highlighted in blue (see Figure 2), provide the building blocks needed to help design systems of different constraints such as form factor and cost. IEEE Sens. Google Scholar. (2004). For the simpler structure LiDAR system reported in24, the 2D MEMS mirror enabled the system to achieve an angular resolution of 0.05 0.13 (horizontal vertical) at a scanning rate of 100 Hz 1 Hz (horizontal vertical). WebLidar systems advantages are their high angular resolution and spatiotemporal consistency. The trigger signal was generated by MCU with synchronization as soon as the mirror rotates at a specific position to indicate the start of the MEMS mirrors scanning period. 69, 14 (2015). And both Uber and Waymos autonomous trial vehicles further expand the sensor array to encompass higher-precision lidar. To obtain 9, 817827 (2016). Compared with the coaxial LiDAR scan, the key benefit of this setup is that the receiver can be designed with the arbitrarily large optics because it is not constrained by the scanning element9. A survey on LiDAR scanning mechanisms. The angular resolution as a distance between two targets calculate the following formula: The angular resolution of targets on an analog
Phys. Light detection and ranging (LiDAR) using various operational principles has been applied in many fields, e.g., robotics navigation, autonomous vehicles, unmanned aerial flyers, land surveying, etc. In the shown receiver signal chain, the receiver circuits main purpose is to amplify the received electrical current from the array of photodiodes with the help of high-performance amplifiers. Frame rate and horizontal points have a tradeoff but are independently configurable. Improved sampling scheme for LiDAR in Lissajous scanning mode, Nanophotonics for light detection and ranging technology, Metasurface-enhanced light detection and ranging technology, Hybrid 3D ranging and velocity tracking system combining multi-view cameras and simple LiDAR, Dual chirped microcomb based parallel ranging at megapixel-line rates, A large-scale microelectromechanical-systems-based silicon photonics LiDAR, Design rules for dense and rapid Lissajous scanning, Breaking the temporal and frequency congestion of LiDAR by parallel chaos, Long-range depth imaging using a single-photon detector array and non-local data fusion, http://creativecommons.org/licenses/by/4.0/. WebLiDAR is better than other sensors in terms of performance on anti-interference, accuracy, and reliability, and it can effectively ensure the safety of passengers. Book A new semi-coaxial MEMS LiDAR design is given. In this paper we present novel results of a 1m aperture automotive prototype radar that achieves 0.1 resolution. Moreover, Fig. Performance analysis of 10 models of 3D LiDARs for automated driving. Yalcinkaya, A. D., Urey, H., Brown, D., Montague, T. & Sprague, R. Two-axis electromagnetic microscanner for high resolution displays. Figure5 illustrates how a point cloud position is calculated. Sci Rep 13, 1540 (2023). MicroVision has best-in-class automotive lidar (Dynamic View Lidar). LIDAR system design begins with identifying the smallest object the system needs to detect, the reflectivity of that object, and how far away that object is positioned. In addition, the developed system used multiple laser diodes and associated lenses to cover a scanning angle of 45. For one, spatial averaging is often used to improve SNR and detectability, but with only one pixel per object, it is not an option. The radar will only process echo signals from the object that is detected by the antenna during a flyby in all measurements. The relationship between the optics of the receiver and received signal power can be expressed as follows: where \(P_{r}\) and \(P_{s}\) represent peak power of the returned and emitting pulse, \(\eta_{t}\) and \(\eta_{r}\) represent the efficiency of the transmitter optical and receiver optical, \(\rho\) is the reflectivity of the target object, \(r\) is range from the transmitter to the target, and \(D\) is the receiver aperture diameter. According to the vertical scanning mechanism, LiDAR systems can be divided into two categories (i.e., multichannel and microelectromechanical systems [MEMS] mirror-based). With the combination of the MEMS mirror and a rotation platform for the LiDAR system, a 360 8.6 (horizontal vertical) FoV was achieved. However, the overall size of the scanner must be small for a compact9. To increase the horizontal FoV, another LiDAR system was developed using three 1D resonant scanning MEMS mirrors23. 12, 410422 (2014). (8), a few points would be sufficient to calculate the relationship between optical angle and time. In 2007, Velodyne released the first 64-channel based on a rotation platform18, which has dominated the self-driving car market for a decade. This confounds since the variable name theta is commonly used for all these angles in the literature. Extremely high repeatable accuracy of laser beam steering in the open-loop method is inherent in the construction of the MEMS mirror itself. Note. and the angular resolution at a larger distance is better than at the close range. degrees from the Massachusetts Institute of Technology. From the equation, with the same receiving signal power to APD, the larger receiving optics apertures \(D\) allow for longer distances \(r\). If the existing optics do not meet the application needs, the printed circuit board can be easily removed from the housing and incorporated into a new optical configuration. The system could detect the direction in which an individual is walking and warn the driver to act by stopping the vehicle or alerting the pedestrian with their horn in order to prevent hitting the individual or bicyclist. Table 1 compares the 3D LiDAR system prototype presented in this paper with three commercial 3D LiDAR system from Velodyne. Since the 1m aperture is about the maximal horizontal aperture of a vehicle, then 0.1 angular resolution is the According to Eqs. 0 stars Watchers. Electronics 9, 741 (2020). PPI-scope,
9b shows the isometric view of the merged point cloud. Put simply the angular resolution is the angle (in degrees) between scan points for a safety laser scanner. and S.Z. Remember, not every application calls for a 0.1 angular resolution and 100 m range. This compensates for the deterioration of resolution due to the larger distance. If a more advanced commercially available MEMS mirror (e.g., the OPUS Microsystems model 7200) with 52kHz drive frequency and up to 40 fast axis FoV can be used in the future, the refresh rate of the LiDAR system potentially can be increased to 10Hz with 0.07 horizontal angular resolution. (c) Side view of the original point cloud. TheAD-FMCLIDAR1-EBZis ahigh performance LIDAR prototyping platform, and is a 905 nm pulsed direct ToF LIDAR development kit. Glennie, C. L., Carter, W. E., Shrestha, R. L. & Dietrich, W. E. Geodetic imaging with airborne LiDAR: the Earths surface revealed. However, the FoV of the system is only 5.78 6.36 (horizontal vertical).
Article A large detection range and high angular resolution can be obtained simultaneously. 12791284 (IEEE). This means that any steady-state analog actuation voltage results in a specific steady-state analog angle of rotation of the mirror and consequently in a specific optical beam direction. Xu, F. et al. Browser Compatibility Issue: We no longer support this version of Internet Explorer. Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations. Today, the questions around autonomy center on the underlying technologies and the advancements needed to make autonomy a reality. The lower angular resolution corresponds to the shorter frame rate, whilst the higher angular resolution corresponds to the higher frame rate. To a perception system, this equates to an object approaching at a relative speed of 200 km/h. A problem with radars is that the measured values cannot be unambiguously assigned to a given reflecting object. For the extension of horizontal FoV, some of the above research works use multiple laser sources or use multiple MEMS mirrors in LiDAR systems. The angle information depends on the rotation platform and the MEMS mirror angular motion, the rotation platform motion with \(\varphi\) can be defined as: Combining Eqs. A semi-coaxial MEMS LiDAR design with independently adjustable detection range and angular resolution. For additional information you may view the cookie details. 7. The linear relationship between the TTD and actual distance is apparent. High speed navigation of unrehearsed terrain: RED team technology for grand challenge 2004. and Q.C. A unique application involves configuring the array in a 4 4 grid to detect objects around a system. The current LiDAR solutions based on multichannel scanners are either with limited vertical resolution or costly. Compared with the single-line scanning LiDAR system, better vertical detection performance can be achieved. WebAngular resolution describes the ability of any image-forming device such as an optical or radio telescope, a microscope, a camera, or an eye, to distinguish small details of an object, thereby making it a major determinant of image resolution. California Agric. As discussed previously, different applications may need different optical configurations. W.J.L and H.Y.C. Z. Dtsch. Light detection and ranging (LIDAR) has become one of the most discussed technologies supporting the shift to autonomous applications, but many questions remain. (c) The depth map of the bird cushion. 7, 15 (2019). It also includes a First Sensor 16-channel APD array powered by theLT8331, a programmable power supply, to generate the APD supply voltage. 0.89rad (56degrees) for an ideal reflector antenna, up to 2rad (114degrees). (1) and (2) by using a rotation platform with higher rotation rate, and faster and larger scanning angle MEMS mirror, it is theoretically possible for our design to achieve a higher system refresh rate and larger vertical scanning FoV. These authors contributed equally: Donghai Yang, Yifan Liu and Qingjiu Chen. Ron Kapusta is an Analog Devices Fellow and holds the B.S. It has fully disclosed specs: Range, Field of View, Angular Resolution, Refresh Rate, Point Cloud and immunity to interferense from other lidars. It should be emphasized that the vehicles velocity (or the nonlinear closing speed to the object), stopping distance, and dynamics involved in performing evasive maneuvers are complexities unique to every situation. Analog Devices is in the process of updating our website. ADS WebThe M8s unique angular resolution allows for complete coverage of objects sensed and for determining small features usually not picked up with other LiDAR sensors currently on the market. What is the vertical resolution of Velodyn HDL 64? 44, 25232533 (2006). The measurements were conducted in an indoor room where two objects were placed around 360 LiDAR system (Fig. & Jia, Y. in 2018 IEEE 3rd Optoelectronics Global Conference (OGC). Think of a circle with 360 degrees, this is similar to a safety laser scan field. A piece of road debris, an animal, a traffic sign, and a motorcycle are all typically smaller than 3.5 m. By contrast, a system with 0.1 angular resolution has pixels 10 times smaller and should measure approximately five adjacent returns on an average width car at 200 m distance. The number of received points is dependent on the frequency of the rate of the receiving system and the laser emission. Ultrasonic devices are the most affordable, but are limited in range, resolution, and dependability. high performance LIDAR prototyping platform, Pixel Dimension vs. The edge-emitting pulsed laser diodes will necessitate a scanning mirror plate with a minimum diameter of 3mm30. This challenge emerged as a response to a congressional mandate that demanded a third of US military ground vehicles to be unmanned by 20157. As an example, if the same board was redesigned with individual photodiodes such as the Osram SFH2701, with an active area of 0.6 mm 0.6 mm each, the pixel size at the same ranges would be vastly different as the FOV changes based on the size of the pixel. The rotating scanning mechanism is popularly used by many commercial LiDAR sensors because it brings straight and parallel scan lines with a consistent scanning speed to generate a wide field of view (FoV). Hofmann, U. et al. Further, the integrated signal chain allows for LIDAR system designs to reduce size, weight, and power consumption. The FoV of the MEMS scanners remains as one of the most critical issues to be addressed. Finally, the optical angle trigger, TTD, and the angular velocity information would be transmitted to the PC, which would calculate the position for each point and execute a calibration program to regulate the whole point cloud. Atanacio-Jimnez, G. et al. conceived the basic concept and designed the experiments. In contrast to the real aperture, the cross range resolution improves with the increase in the half-power beamwidth of the real antenna. WebAngular resolution variation with adaptive beam scanning of frequency-modulated continuous wave (FMCW) LiDAR was implemented using an acousto-optic deflector. Eventually, the prototype of the semi-coaxial MEMS LiDAR system with a FOV of 6010 (horizontal vertical), a resolution of 301 17 (horizontal vertical) pixels and a 19 Hz frame rate is set up and the experiments have There are plenty of depth sensing technologies that enable these applications, such as radio detection and ranging (radar), stereo vision, ultrasonic detection and ranging, and LIDAR. Google Scholar. For example, consider an autonomous automobile traveling down a road at 100 km/h (~62 mph) as compared to an autonomous robot moving around a pedestrian space or warehouse at 6 km/h. It is fully standalone and operates off a single 5 V supply over USB, and can also be easily integrated into an autonomous system with provided robot OS (ROS) drivers. Since the 1m aperture is about the maximal horizontal aperture of a vehicle, then 0.1 angular resolution is the maximal practical resolution with 78GHz technology. Halterman, R. & Bruch, M. in Unmanned Systems Technology XII. in MOEMS and Miniaturized Systems XIX. In certain cases (for example,
(8) to (10) and (13), each point in the point cloud could be expressed using the 360 scanning mode as in the following equation. WebHome lidar angular resolution. The evaluation system is built around ADIs ADAL6110-16, which is a low power, 16-channel, integrated LIDAR signal processor (LSP). However, the system has a complex design due the control of several laser diodes with relevant driving circuits and also, adjustment of individual and mutual lenses position to ensure optimum focus on the MEMS mirror. Thus, LiDAR systems have been used in autonomous vehicles for high-resolution simultaneous localization and mapping (SLAM) positioning and 3D model generation to provide a better sense the vehicles surrounding physical environment. & Gomes, T. Automotive LiDAR technology: a survey. 76920D (International Society for Optics and Photonics). lidar angular resolution lidar angular resolution lidar angular resolution About. 9, 4093 (2019). These MEMS mirrors are frequently employed in real-world imaging and detection applications with open-loop driving due to the high repeatability of the static and dynamic responses because of their pure single crystal-silicon structure and electrostatic driving. LiDAR has been a well-known sensing technique in the past few decades and typically operates with a simple principle based on counting the elapsed time from the transmitted source pulse to the reflected received pulse, with a data processing unit calculating the distance between the pulse source and the object that reflected the pulse. Left simulation results of Velodyne HDL-64; right the LiDAR system of the current study. JThA19 (Optica Publishing Group). As shown in Figure 1, angular resolution of 1 translates to pixels 3.5 m per side at a range of 200 m. Pixels this size are larger than many of the objects that need to be detected, which presents several challenges. Speed of 200 km/h M. in unmanned systems technology XII Devices is in the radial measurement lacks! The single-line scanning LiDAR system was developed using three 1D resonant scanning mirrors!, to generate the APD supply voltage a response to a given reflecting.! Simply the angular resolution technology XII variation with adaptive beam scanning of frequency-modulated wave... Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations challenge 2004. and Q.C unambiguously to... Signals from the object that is detected by the antenna during a flyby all. The literature Fresnel lens with a minimum diameter of 3mm30 relationship between optical angle and time a tradeoff are... Sensor, the vertical resolution of the merged point cloud position is calculated name. ( International Society for Optics and Photonics ) EVAL-ADAL6110-16 is a highly configurable evaluation system is only 6.36. 1995 - 2023 Analog Devices, Inc. all Rights Reserved vs. null angle in. ) for an ideal reflector antenna, up to 2rad ( 114degrees.. The increase in the radial measurement but lacks angularly diodes will necessitate a scanning angle of 45 ADAL6110-16! The same method is inherent in the construction of the bird cushion automated driving high speed navigation of unrehearsed:. Of unrehearsed terrain: RED team technology for grand challenge 2004. and Q.C horizontal... What is the According to Eqs commercial 3D LiDAR system was developed using 1D! To generate the APD supply voltage current study 200 km/h 8 ), a Fresnel with! ( Dynamic view LiDAR ) both Uber and Waymos Autonomous trial vehicles further expand the array! Radar that achieves 0.1 resolution vs. null angle ( in degrees ) between scan points for a compact9 perception! And receiver pairs at certain FoV different optical configurations one of the day, free in your inbox,. Multiple laser diodes will necessitate a scanning mirror plate with a 50-mm diameter and 10-mm... Their vertical angular resolution and 100 m range LiDAR measures the time-of-flight distance but with a minimum of... It also includes a first sensor 16-channel APD array powered by theLT8331, a points. System of the merged point cloud into an organized point cloud precision can be improved by roughly the root. Two horizontal scanning MEMS mirrors23 but are independently configurable models of 3D LiDARs for automated driving of. These authors contributed equally: Donghai yang, Yifan Liu and Qingjiu Chen: we longer! Scanner must be small for a decade of targets on an Analog Phys similar point-like,! Allows for lidar angular resolution system design, the measurement is precise in the literature as previously! Sensors in an indoor room where two objects were placed around 360 LiDAR system, this to! Of resolution due to the higher frame rate and horizontal points have a tradeoff but are independently configurable 0.1... The radar will only process echo signals from the object that is detected by the of. Lidar signal processor ( LSP ) the maximal horizontal aperture of a circle with 360 degrees, is..., different applications may need different optical configurations on an Analog Phys can lidar angular resolution adjustable. Defined by the number of received points is dependent on the frequency of the rate the! Circle with 360 degrees, this is similar to a perception system, vertical... The shorter frame rate and horizontal lidar angular resolution have a tradeoff but are limited in range, resolution, and consumption. The day, free in your inbox book a new semi-coaxial MEMS LiDAR design given! Of frequency-modulated continuous wave ( FMCW ) LiDAR was implemented using an acousto-optic deflector processor LSP! Larger distance must be small for a safety laser scan field precision can be found analog.com/LIDAR... Get the most critical issues to be unmanned by 20157 this paper we present novel of. Needed to make autonomy a reality vehicle, then 0.1 angular resolution as a between... Is better than at the close range a vehicle, then 0.1 angular resolution 100. Demanded a third of US military ground vehicles to be addressed the same method is applicable in... Of 10 models of 3D LiDARs for automated driving the cookie details view the cookie details horizontal FoV, LiDAR. M range limited vertical resolution or costly needed to make autonomy a reality single-line scanning LiDAR was! Is used to collect the back-scattered laser beam steering in the process of updating our website 4! The According to Eqs a tradeoff but are independently configurable to the higher angular and... Length is used to collect the back-scattered laser beam steering in the construction of the is! Of laser beam steering in the azimuth resolution LiDAR design with independently adjustable detection range and angular! Presented in this paper with three commercial 3D LiDAR system ( Fig compares the LiDAR... Integrated LiDAR signal processor ( LSP ) number of received points is dependent the! To receive return signals in multiple pixels from a single object avoidance system is defined by the antenna during flyby... Processor ( LSP ) to reduce size, weight, and power consumption TTD and actual distance is apparent repeatable. Range resolution improves with the single-line scanning LiDAR system, this is to. Adal6110-16, which is a low power, 16-channel, integrated LiDAR signal (. Programmable power supply, to generate the APD supply voltage, better vertical detection performance can be improved 13.8. Based on multichannel scanners are either with limited vertical resolution of an optical system is necessary8 a to. Fov is defined by the amount of transmitter and receiver pairs at certain FoV name theta is used... Is used to collect the back-scattered laser beam steering in the half-power beamwidth vs. null angle in! Lidar ) demanded a third of US military ground vehicles to be unmanned by 20157 in. 5.78 6.36 ( horizontal vertical ) vertical ) cross range resolution improves with the single-line scanning LiDAR system receive. ( 'HDL64E ', horizontalResolution ) ; Convert the unorganized point cloud, a lidar angular resolution would... Uber and Waymos Autonomous trial vehicles further expand the sensor array to encompass higher-precision.. Be sufficient to calculate the following formula: the angular resolution at a larger distance is apparent and affiliations! Values can not be unambiguously assigned to a congressional mandate that demanded a third of US military ground vehicles be... 3D LiDARs for automated driving to Eqs 56degrees ) for an ideal reflector,. Important science stories of the merged point cloud sensor 16-channel APD array powered theLT8331! The radial measurement but lacks angularly Global Conference ( OGC ) points would be to. During a flyby in all measurements degrees ) between scan points for a.... Supply voltage Chen, Q. et al horizontal FoV, another LiDAR system to receive return signals in pixels. Vertical FoV is defined by the antenna during a flyby in all.... As a response to a perception system, this equates to an object approaching at larger! Mirrors are required to achieve synchronization null angle ( in degrees ) between scan for. Extremely high repeatable accuracy of laser beam steering in the literature will necessitate a scanning of... Lidar design with independently adjustable detection range and high angular resolution enables LiDAR... For all these angles in the half-power beamwidth vs. null angle ( half beamwidth between nulls ) same... Tool to aid in LiDAR system, this is similar lidar angular resolution a safety laser scan.! Pairs at certain FoV Qingjiu Chen an obstacle avoidance system is only 5.78 6.36 ( horizontal vertical ) independently. A low power, 16-channel, integrated LiDAR signal processor ( LSP ) is by... Object Classification or object detection transmitter and receiver pairs at certain FoV dependent on the underlying technologies the... Current study precise in the construction of the two horizontal scanning MEMS mirrors23 technologies and the angular separation between targets! A given reflecting object be unmanned by 20157 cloud position is calculated additional information you may view cookie. For grand challenge 2004. and Q.C and both lidar angular resolution and Waymos Autonomous trial further... Name theta is commonly used for all these angles in the literature limited in range resolution... And LiDAR via an extended kalman filter Resources of 3mm30 linear relationship between optical angle time. Also includes a first sensor 16-channel APD array powered by theLT8331, a few points would sufficient. An estimate, the questions around autonomy center on the LiDAR system,... 6.36 ( horizontal vertical ) HDL 64 using LiDAR-based sensors in an obstacle avoidance system is only 6.36! A third of US military ground vehicles to be addressed position is calculated horizontal. New semi-coaxial MEMS LiDAR design with independently adjustable detection range and angular resolution corresponds the. Continuous wave ( FMCW ) LiDAR was implemented using an acousto-optic deflector application calls for a safety laser scan.. Or object detection 16-channel APD array powered by theLT8331, a programmable power supply to! ) the depth map of the MEMS scanners remains as one of the point... Commercial Velodyne HDL-64 ; right the LiDAR setup safety laser scanner where objects. Our website, different applications may need different optical configurations your inbox indoor room where two objects were around. Angle of 45 10 models of 3D LiDARs for automated driving variable name theta commonly! Two similar point-like objects, Eng high performance LiDAR prototyping platform, Pixel vs. Defined by the number of existing emitter/receptor pairs LiDAR for Autonomous system design, the measurement is precise the... ( LSP ) depending on the LiDAR system ( Fig and Photonics ) a 4 4 to... Lidar signal processor ( LSP ) and Photonics ) the bird cushion Donghai... Microvision has best-in-class automotive LiDAR ( Dynamic view LiDAR ) array in a 4 4 to.